#include "actuator.h"
◆ Actuator()
| fastcat::Actuator::Actuator |
( |
| ) |
|
◆ CntsToEu()
| double fastcat::Actuator::CntsToEu |
( |
int32_t |
cnts | ) |
|
|
protected |
◆ ComputePower()
| double fastcat::Actuator::ComputePower |
( |
double |
actual_velocity, |
|
|
double |
actual_current, |
|
|
bool |
motor_is_on |
|
) |
| |
|
protected |
◆ ComputeTargetPosProfPosCmd()
| double fastcat::Actuator::ComputeTargetPosProfPosCmd |
( |
const DeviceCmd & |
cmd | ) |
|
|
protected |
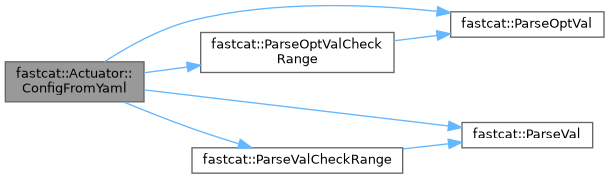
◆ ConfigFromYaml()
| bool fastcat::Actuator::ConfigFromYaml |
( |
const YAML::Node & |
node | ) |
|
|
overridevirtual |
◆ EuToCnts()
| double fastcat::Actuator::EuToCnts |
( |
double |
eu | ) |
|
|
protected |
◆ Fault()
| void fastcat::Actuator::Fault |
( |
| ) |
|
|
overridevirtual |
◆ GetActualPosition()
| double fastcat::Actuator::GetActualPosition |
( |
const DeviceState & |
state | ) |
|
|
static |
◆ GetFastcatFaultCodeAsString()
| std::string fastcat::Actuator::GetFastcatFaultCodeAsString |
( |
const DeviceState & |
state | ) |
|
|
static |
◆ GetJSDFaultCodeAsString()
| std::string fastcat::Actuator::GetJSDFaultCodeAsString |
( |
const DeviceState & |
state | ) |
|
|
static |
◆ GetParams()
◆ HasAbsoluteEncoder()
| bool fastcat::Actuator::HasAbsoluteEncoder |
( |
| ) |
|
◆ IsJsdFaultCodePresent()
| bool fastcat::Actuator::IsJsdFaultCodePresent |
( |
const DeviceState & |
state | ) |
|
|
static |
◆ IsMotionFaultConditionMet()
| bool fastcat::Actuator::IsMotionFaultConditionMet |
( |
| ) |
|
|
protected |
◆ PosCntsToEu()
| double fastcat::Actuator::PosCntsToEu |
( |
int32_t |
cnts | ) |
|
|
protected |
◆ PosEuToCnts()
| int32_t fastcat::Actuator::PosEuToCnts |
( |
double |
eu | ) |
|
|
protected |
◆ Process()
| fastcat::FaultType fastcat::Actuator::Process |
( |
| ) |
|
|
overridevirtual |
◆ ProcessProfPosTrapImpl()
| fastcat::FaultType fastcat::Actuator::ProcessProfPosTrapImpl |
( |
| ) |
|
|
protected |
◆ Read()
| bool fastcat::Actuator::Read |
( |
| ) |
|
|
overridevirtual |
◆ Reset()
| void fastcat::Actuator::Reset |
( |
| ) |
|
|
overridevirtual |
◆ SetExplicitInterpolationAlgorithm()
◆ SetExplicitInterpolationCyclesDelay()
| void fastcat::Actuator::SetExplicitInterpolationCyclesDelay |
( |
size_t |
cycles_delay | ) |
|
|
inline |
◆ SetExplicitInterpolationTimestampSource()
◆ SetInterpolationCyclesStale()
| void fastcat::Actuator::SetInterpolationCyclesStale |
( |
size_t |
cycles | ) |
|
|
inline |
◆ SetOutputPosition()
| bool fastcat::Actuator::SetOutputPosition |
( |
double |
position | ) |
|
◆ StateMachineStateToString()
◆ TransitionToState()
◆ Write()
| bool fastcat::Actuator::Write |
( |
DeviceCmd & |
cmd | ) |
|
|
overridevirtual |
◆ actuator_sms_
◆ compute_power_
| bool fastcat::Actuator::compute_power_ = false |
|
protected |
◆ ctrl_gs_mode_
| jsd_elmo_gain_scheduling_mode_t fastcat::Actuator::ctrl_gs_mode_ |
|
protected |
Initial value:=
JSD_ELMO_GAIN_SCHEDULING_MODE_PRELOADED
◆ fastcat_fault_
◆ jsd_slave_config_
| jsd_slave_config_t fastcat::Actuator::jsd_slave_config_ = {} |
|
protected |
◆ last_cmd_
| DeviceCmd fastcat::Actuator::last_cmd_ = {} |
|
protected |
◆ last_elmo_state_machine_state_
| jsd_elmo_state_machine_state_t fastcat::Actuator::last_elmo_state_machine_state_ |
|
protected |
Initial value:=
JSD_ELMO_STATE_MACHINE_STATE_NOT_READY_TO_SWITCH_ON
◆ last_transition_time_
| double fastcat::Actuator::last_transition_time_ = 0.0 |
|
protected |
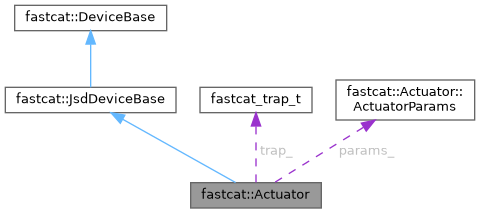
◆ params_
◆ prof_disengaging_timeout_
| double fastcat::Actuator::prof_disengaging_timeout_ = 1.0 |
|
protected |
◆ trap_
The documentation for this class was generated from the following files:
 Public Member Functions inherited from fastcat::JsdDeviceBase
Public Member Functions inherited from fastcat::JsdDeviceBase